


W pierwszej części artykułu zostały omówione sposoby rozmieszczania czujek według zasady stałego zasięgu, używane w wielu metodykach projektowania. W praktyce sprowadzały się one do nanoszenia okręgów symbolizujących zasięg czujki na podkładach projektowych w taki sposób, aby dowolnie wybrany punkt na stropie znajdował się w zasięgu czujki. Taki sposób rozmieszczania czujek z ich założonymi zasięgami (promieniami działania) wynikającymi z wytycznych projektowych można zastosować w pomieszczeniach o wysokości do 12 m. W niniejszej części przedstawię inną metodę rozmieszczania czujek, która zakłada nadzorowanie przez czujkę określonej powierzchni.
I. Zasada stałej wartości powierzchni nadzorowanej zgodna z wytycznymi VdS w wersji 2095:2010-05(07)
 Tab. 1
Tab. 1
Główne założenia:
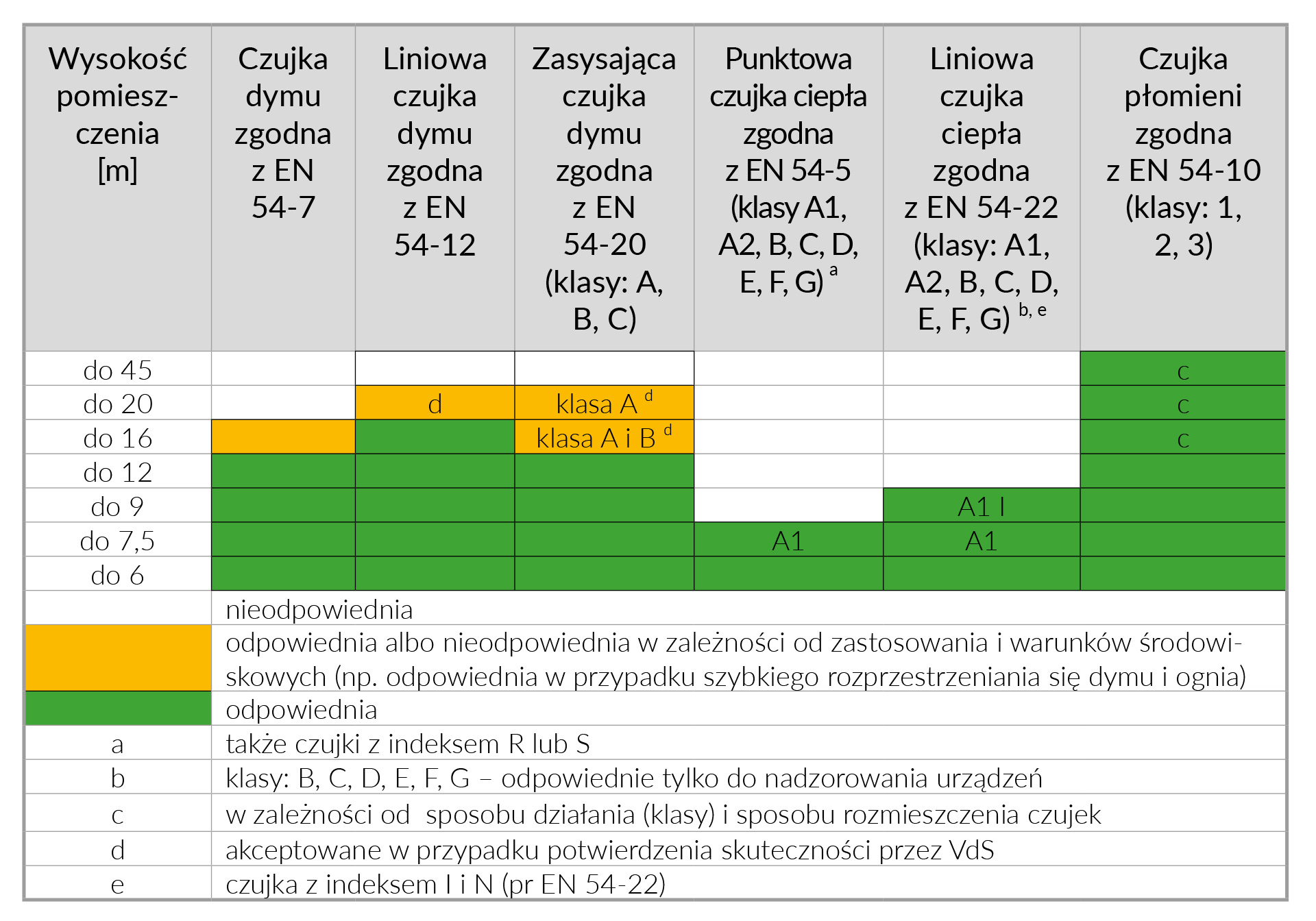
- Maksymalne wysokości, na jakich instaluje się różne rodzaje czujek, są podane w wytycznych VdS w punkcie 6.1.5.3, w tabeli nr 1.
- W przeciwieństwie do wytycznych, zgodnie z którymi stosuje się zasadę stałego zasięgu czujki, tutaj przyjmuje się powierzchnię nadzorowaną w formie prostokąta (częściej) lub kwadratu.
- W tabeli nr 2 w wytycznych VdS 2095:2010-05(07), w punkcie 6.2.7.2, różnym rodzajom czujek (czujkom dymu, punktowym czujkom ciepła, liniowym czujkom dymu i ciepła) przyporządkowano odpowiednie powierzchnie nadzorowane, zależne od powierzchni i wysokości pomieszczeń oraz różnych nachyleń stropu. Tabela nie jest zawarta w tym artykule, dlatego zachęcam Czytelników do zapoznania się z oryginalnymi wytycznymi.
Poniżej przedstawione są jedynie niektóre wymagania dotyczące powierzchni nadzorowanej – na podstawie tabeli nr 2.
Przykład
W pomieszczeniu o powierzchni P ≤ 80 m2 i wysokości H ≤ 12 m, w którym może wystąpić pożar płomieniowy i bezpłomieniowy, powierzchnia nadzorowana przez czujkę dymu w przypadku stropu płaskiego i nachylonego wynosi S = 80 m2. W pomieszczeniu o powierzchni P > 80 m2 i wysokości H ≤ 6 m powierzchnia nadzorowana przez czujkę zainstalowaną na stropie płaskim wynosi S = 60 m2, natomiast w przypadku czujki zainstalowanej na stropie nachylonym pod kątem >20° wynosi 90 m2. Jeżeli wysokość H pomieszczenia o powierzchni P < 80 m2 wynosi od 6 m do 12 m, to powierzchnia nadzorowana przez czujkę zainstalowaną na stropie płaskim wynosi S = 80 m2, natomiast w przypadku czujki zainstalowanej na stropie nachylonym pod kątem >20° wynosi 110 m2.
Czujki ciepła punktowe (klasy A1, A2, B, C, D, E, F, G) oraz liniowe (klasy A1, A2), instalowane na stropie płaskim na wysokości do 6 m, a także czujki punktowe klasy A1 oraz liniowe klasy A1, instalowane na wysokości do 7,5 m, w pomieszczeniu o powierzchni P ≤ 30 m2 nadzorują powierzchnię S ≤ 30 m2. W przypadku stropu nachylonego pod kątem >20° powierzchnia S wynosi 30 m2.
Czujki ciepła punktowe (klasy A1, A2, B, C, D, E, F, G) oraz liniowe (klasy A1, A2), instalowane na stropie płaskim na wysokości do 6 m, a także czujki punktowe klasy A1 oraz liniowe klasy A1, instalowane na wysokości do 7,5 m, w pomieszczeniu o powierzchni P > 30 m2 nadzorują powierzchnię S ≤ 20 m2. W przypadku stropu nachylonego pod kątem >20° powierzchnia S wynosi 40 m2.
- Określone są maksymalne poziome odległości Dh między czujką a najbardziej odległym punktem na stropie, w zależności od stopnia nachylenia stropu, a także dobranej powierzchni nadzorowanej.
- Określone są dopuszczalne zakresy zmian boków a i b powierzchni nadzorowanej. Jeżeli strop jest płaski, to stosunek boków a/b w przypadku czujek dymowych może wynosić maksymalnie 0,66, natomiast w przypadku czujek ciepła – maksymalnie 0,5. W przypadku stropu nachylonego pod kątem >20° może on wynosić – odpowiednio – maksymalnie 0,33 i maksymalnie 0,25.
Poniżej znajdują się przykładowe wykresy pokazujące możliwe zakresy zmian boków przyjętej powierzchni nadzorowanej S. Wykresy wykonano z wykorzystaniem arkusza w programie Excel. Przyjęto daną powierzchnię nadzorowaną zgodną z punktem 2, a następnie dla wybranych długości boków a tej powierzchni obliczano długość boku b. Zakres zmian boków w zależności od kąta nachylenia stropu przyjęto na podstawie punktu 4.

Rys. 1. Powierzchnia pomieszczenia P ≤ 80 m2, powierzchnia nadzorowana S = 80 m2, wysokość pomieszczenia H ≤ 12 m. Czujka dymu. Strop płaski. Najdłuższy bok powierzchni nadzorowanej a = 11 m; bok b = 7,3 m (lub odwrotnie)
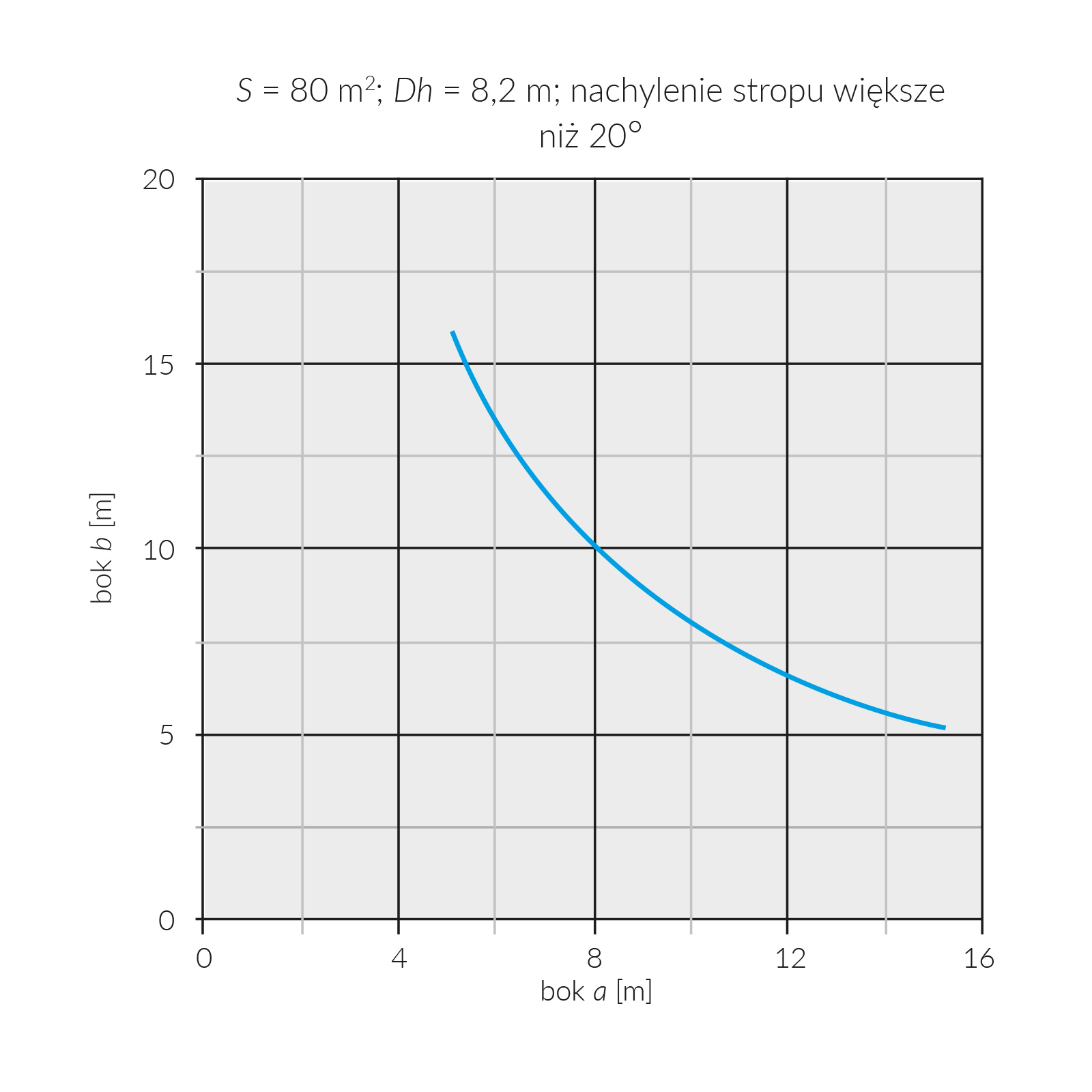
Rys. 2. Powierzchnia pomieszczenia P ≤ 80 m2, powierzchnia nadzorowana S = 80 m2, wysokość pomieszczenia H ≤ 12 m. Czujka dymu. Strop o nachyleniu większym niż 20°. Najdłuższy bok powierzchni nadzorowanej a = 15,5 m; bok b = 5,16 m (lub odwrotnie)
Można utworzyć analogiczne wykresy dla czujek ciepła. W niniejszym artykule są jedynie dwa. Pozostałe znajdują się w wytycznych VdS.
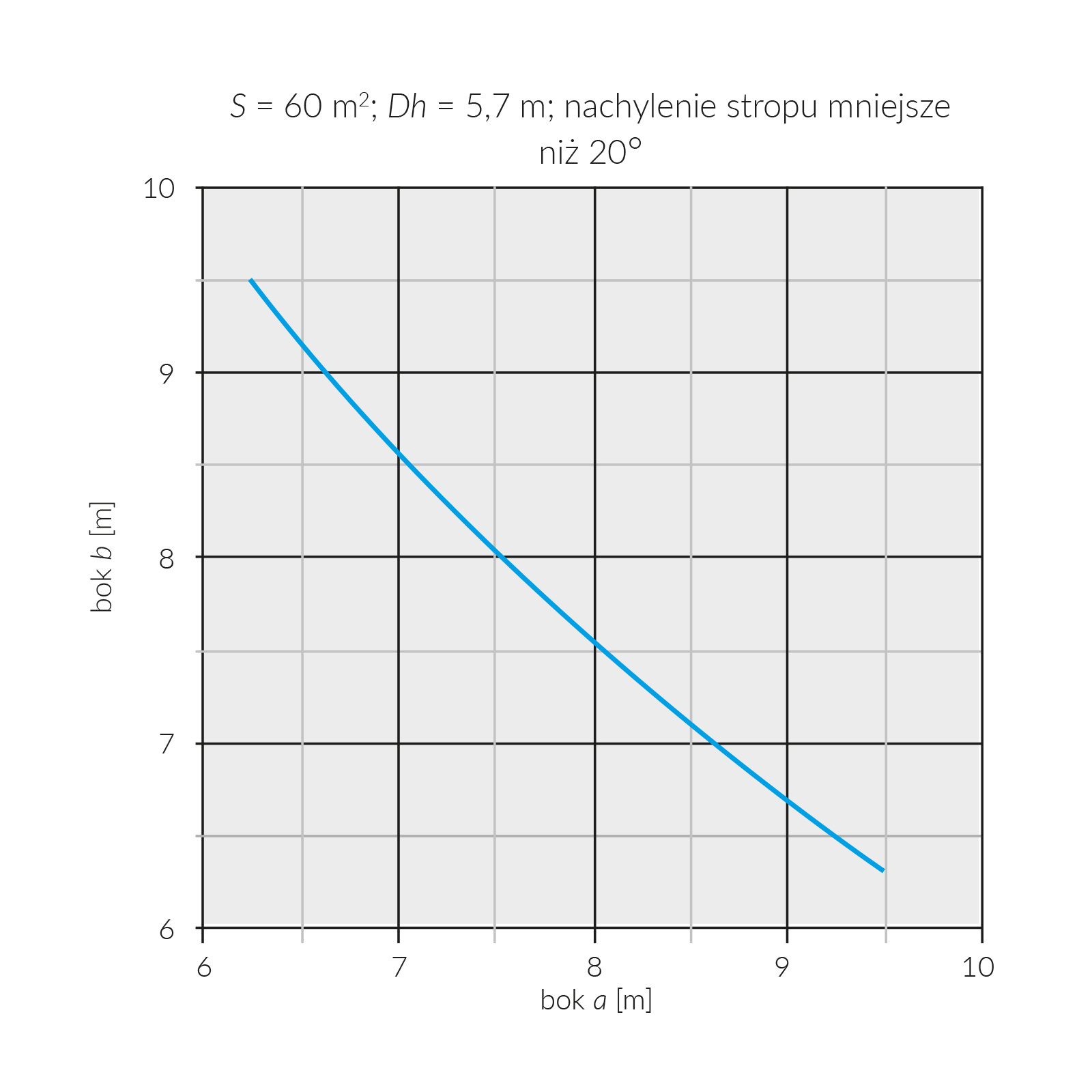
Rys. 3. Powierzchnia pomieszczenia P > 80 m2, powierzchnia nadzorowana S = 60 m2, wysokość pomieszczenia H ≤ 6 m. Czujka dymu. Strop o nachyleniu mniejszym niż 20º. Najdłuższy bok powierzchni nadzorowanej a = 9,5 m; bok b = 6,3 m (lub odwrotnie)
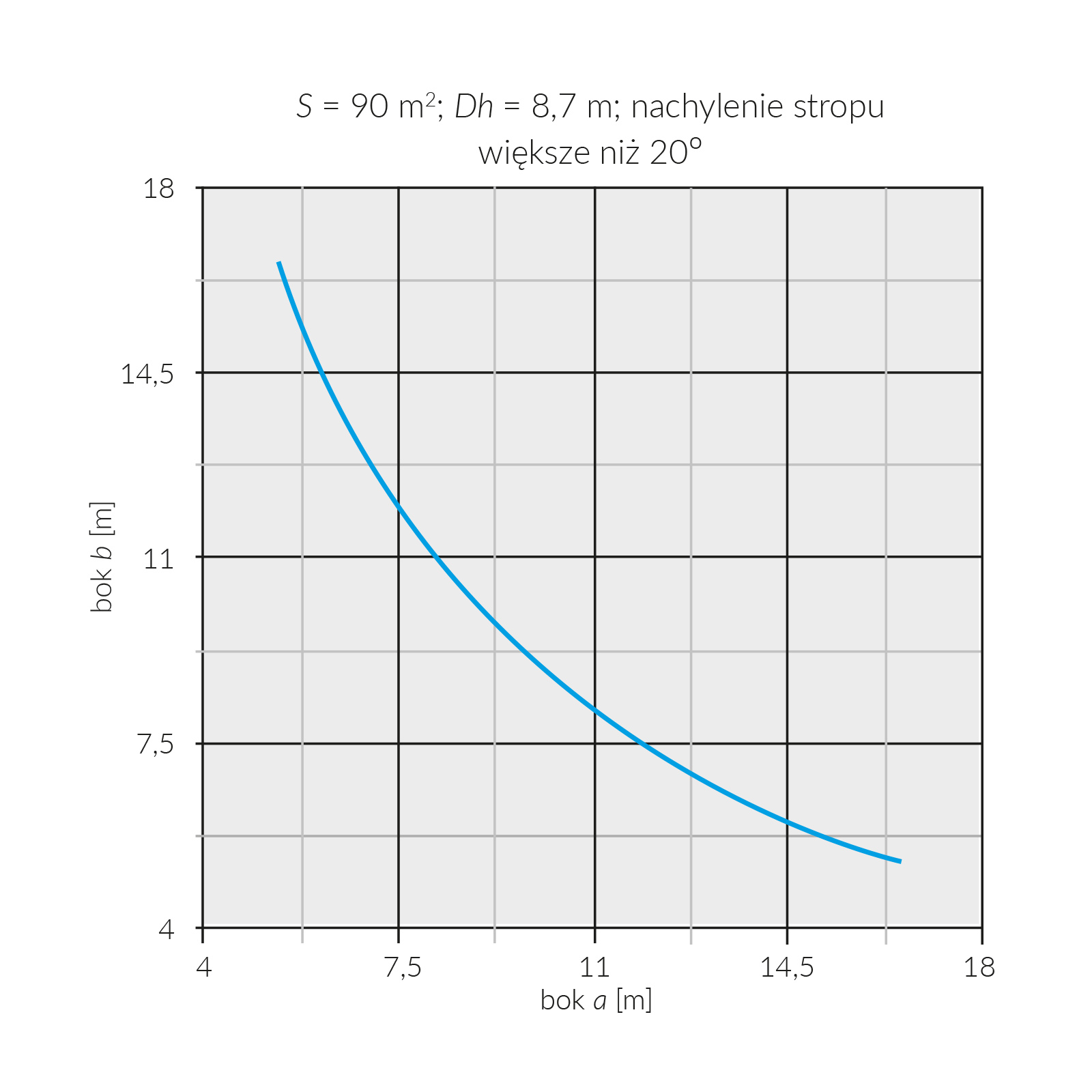
Rys. 4. Powierzchnia pomieszczenia P > 80 m2, powierzchnia nadzorowana S = 90 m2, wysokość pomieszczenia H ≤ 6 m. Czujka dymu. Strop o nachyleniu większym niż 20°. Najdłuższy bok powierzchni nadzorowanej a = 16,5 m; bok b = 5,45 m (lub odwrotnie)

Rys. 5. Powierzchnia pomieszczenia P > 80 m2, powierzchnia nadzorowana S = 110 m2, wysokość pomieszczenia H ≤ 12 m. Czujka dymu. Strop o nachyleniu większym niż 20°. Najdłuższy bok powierzchni nadzorowanej a = 18,15 m; bok b = 6 m (lub odwrotnie)
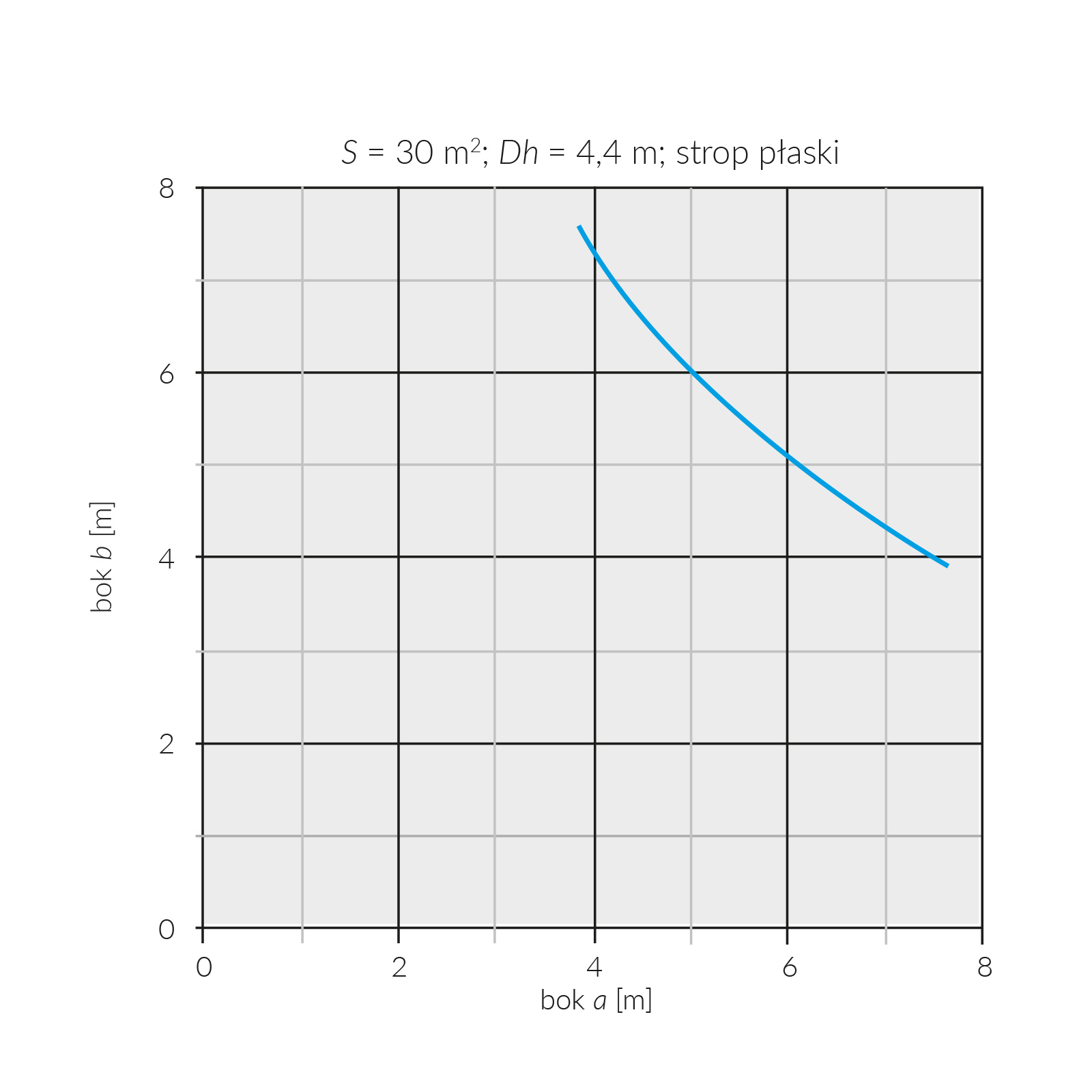
Rys. 6. Powierzchnia pomieszczenia P ≤ 30 m2, powierzchnia nadzorowana S = 30 m2, wysokość pomieszczenia H ≤ 6 m lub H ≤ 7,5 m. Czujka ciepła. Strop o nachyleniu mniejszym niż 20°. Najdłuższy bok powierzchni nadzorowanej a = 7 m; bok b = 3,8 m (lub odwrotnie)

Rys. 7. Powierzchnia pomieszczenia P > 30 m2, powierzchnia nadzorowana S = 20 m2, wysokość pomieszczenia H ≤ 6 m lub H ≤ 7,5 m. Czujka ciepła. Strop o nachyleniu mniejszym niż 20°. Najdłuższy bok powierzchni nadzorowanej a = 6,3 m; bok b = 3,2 m (lub odwrotnie)
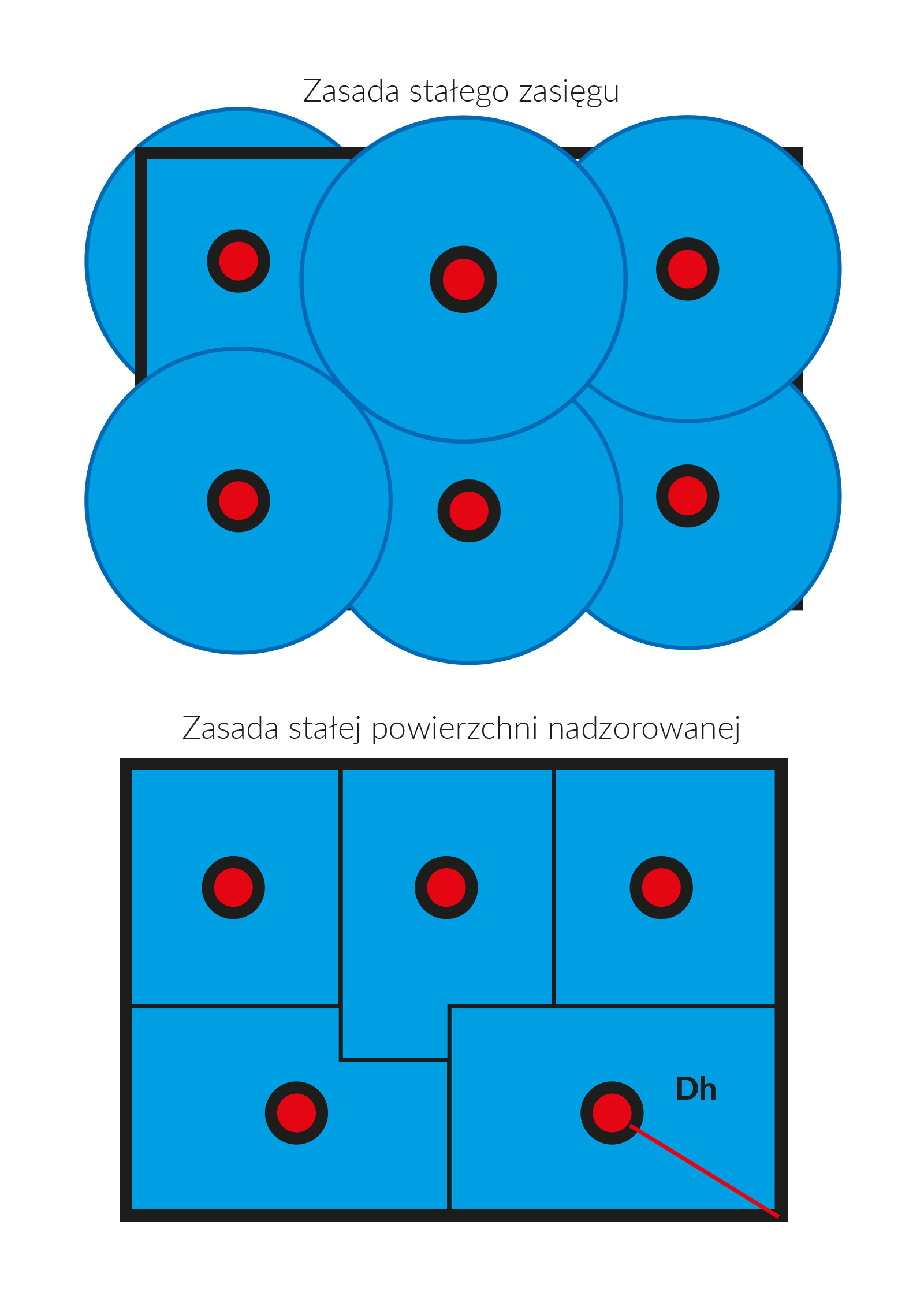
Rys. 8. Rozmieszczenie czujek zgodne z zasadą stałego zasięgu czujki oraz rozmieszczenie zgodne z zasadą stałej powierzchni nadzorowanej. Na podstawie rysunku nie należy sądzić o mniejszej skuteczności zasady stałej powierzchni nadzorowanej. Po prostu przyjęto taki, a nie inny kształt zabezpieczanego pomieszczenia
Rozmieszczenie punktowych czujek pożarowych zgodne z zasadą stałej powierzchni nadzorowanej i rozmieszczenie tych urządzeń zgodne z zasadą stałego zasięgu czujki porównano na rysunku 8.
Obie metody powinny być skuteczne i praktycznie tak jest w przypadku stropów płaskich lub nachylonych pod kątem mniejszym niż 20°. W przypadku stropów silnie nachylonych, o długiej kalenicy i jednocześnie długich spadkach połaci stropowych, punkt 5 założeń (rys. 2, 4 i 5) pozwala jednak – niejako automatycznie – na rozmieszczanie czujek na stropie. Metodyka wykorzystująca zasadę stałego zasięgu, np. przedstawiona w CEN TS54-14: 2018, nie określa dokładnie, jak rozwiązać problem. Problemy związane z rozmieszczaniem czujek na stropach nachylonych nie zostały opisane w niniejszym artykule.
II. Nadzorowanie różnych powierzchni za pomocą czujek punktowych. Sposób postępowania w przypadku stropu płaskiego
Założenie:
- Pomieszczenie ma długość d, szerokość s i wysokość h.
- Wybierz rodzaj czujki punktowej w zależności od przewidywanego rodzaju pożaru i warunków środowiskowych w otoczeniu.
- Sprawdź, czy wybrany rodzaj czujki może być zastosowany w pomieszczeniu o wysokości h.
- Jeśli nie, to wybierz inny sposób nadzoru (np. inny rodzaj czujek).
- Jeśli tak, to:
- wybierz zasięg czujki zgodny z przyjętą metodyką projektowania;
- oblicz liczbę czujek w rzędzie, dzieląc długość pomieszczenia przez dopuszczalną odległość między czujkami dla podziału kwadratowego, a wynik dzielenia zaokrąglij w górę;
- oblicz rzeczywistą odległość między czujkami wzdłuż długości, dzieląc długość pomieszczenia przez przyjętą liczbę czujek;
- oblicz liczbę czujek rozmieszczonych wzdłuż szerokości pomieszczenia, dzieląc szerokość pomieszczenia przez dopuszczalną odległość między czujkami dla podziału kwadratowego, a wynik dzielenia zaokrąglij w górę;
- oblicz rzeczywistą odległość między czujkami wzdłuż szerokości, dzieląc szerokość pomieszczenia przez przyjętą liczbę czujek;
- oblicz liczbę czujek wymaganych do nadzorowania danego pomieszczenia, mnożąc wyniki obu poprzednich obliczeń.
Przykład
Dobór rodzaju i liczby czujek
Założenia:
- pomieszczenie magazynowe ma wymiary 38 m (długość) x 21 m (szerokość) x 10 m (wysokość); strop jest płaski; pomieszczenie jest ogrzewane;
- składowane są w nim meble biurowe w kartonach;
- zastosowane są punktowe czujki dymu;
- przyjęta metodyka projektowania jest zgodna z CEN-TS54-14: 2018 (oczywiście można zastosować inną);
- czujka ma zasięg 6,2 m; odległość między czujkami wynosi 8,8 m;
- liczba czujek odpowiadająca długości pomieszczenia: n = 38/8,8 = 4,318181818181818 (zaokrąglamy do pięciu);
- liczba czujek odpowiadająca szerokości pomieszczenia: m = 21/8,8 = 2,386363636363636 (zaokrąglamy do trzech);
- odległość między czujkami odpowiadająca długości pomieszczenia: a = 38 m/5 = 7,6 m;
- odległość między czujkami odpowiadająca szerokości pomieszczenia: b = 21 m/3 = 7 m;
- liczba czujek w pomieszczeniu: N = n*m = 5*3 = 15.
Uwzględnienie występowania zmian rozkładu temperatury w pomieszczeniu
Przy uwzględnieniu występowania poduszki powietrznej odległość h od stropu, w jakiej czujki mają być zainstalowane, wynosi 0,5 m.
Koordynacja projektu
Należy uzgodnić projekt rozmieszczenia czujek z innymi projektami branżowymi.
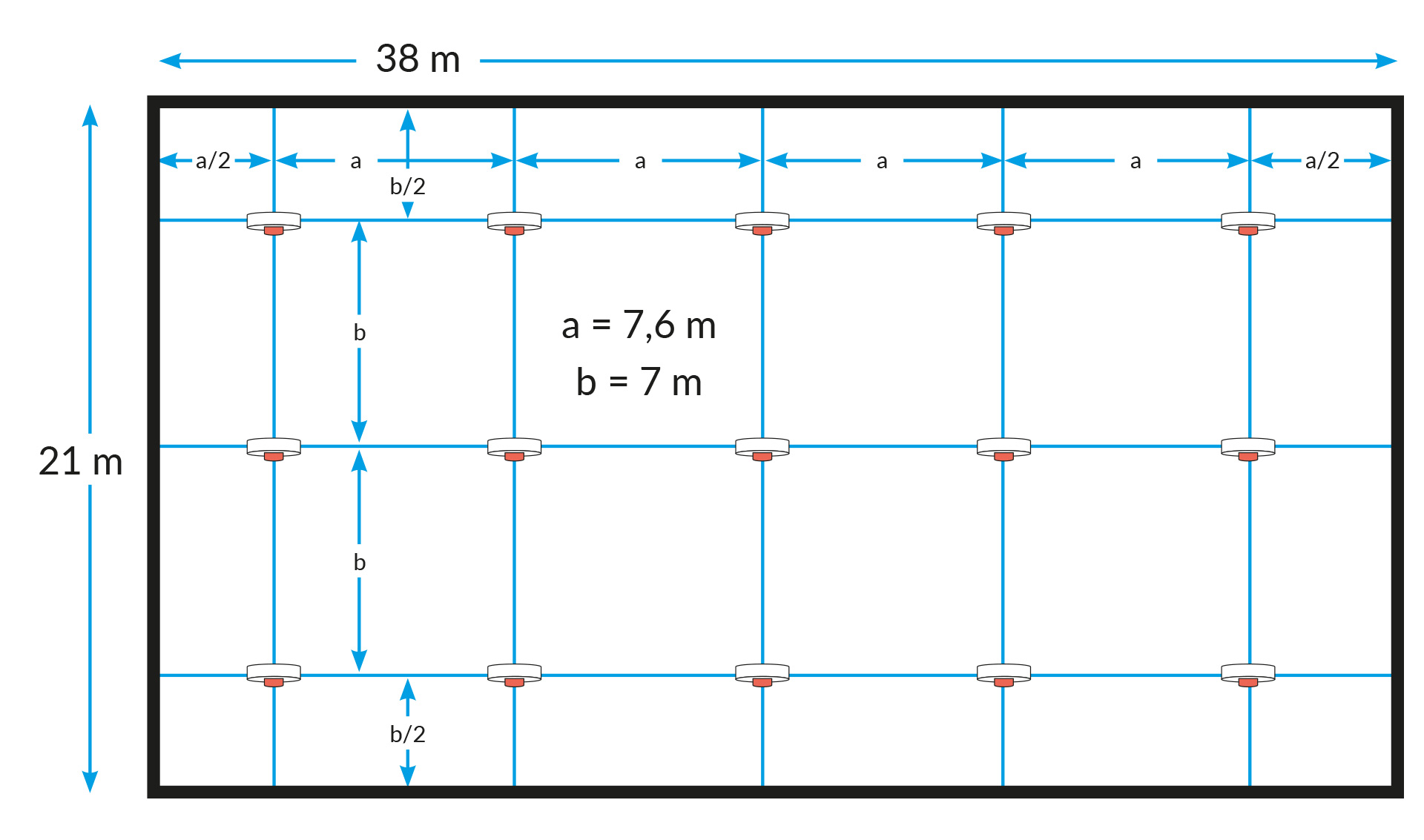 Rys. 9. Sposób rozmieszczenia czujek z przykładu
Rys. 9. Sposób rozmieszczenia czujek z przykładu
 Fot. 1. Brak koordynacji lub uzgodnień dotyczących rozmieszczenia czujek pożarowych z projektantem lub wykonawcą instalacji wodnej. Czujka pokazana na zdjęciu jest praktycznie całkowicie zasłonięta przez rury. Nie ma możliwości wzbudzenia alarmu pożarowego
Fot. 1. Brak koordynacji lub uzgodnień dotyczących rozmieszczenia czujek pożarowych z projektantem lub wykonawcą instalacji wodnej. Czujka pokazana na zdjęciu jest praktycznie całkowicie zasłonięta przez rury. Nie ma możliwości wzbudzenia alarmu pożarowego
 Fot. 2. Zbyt mała odległość między czujką a pionowymi przeszkodami
Fot. 2. Zbyt mała odległość między czujką a pionowymi przeszkodami
Modyfikacja rozmieszczania czujek
W przypadku nadzorowania dużych przestrzeni w pewnych przypadkach opłacalne jest rozmieszczanie czujek w sposób pokazany na rysunku 12. W takich przypadkach zawsze jednak pojawiają się „dziury”, które należy wypełnić dodatkowymi czujkami (nadzorowane powierzchnie oznaczone kolorem czerwonym) z uwzględnieniem zasady nieprzekraczania największej dopuszczalnej odległości między czujką a najbardziej odległym miejscem na stropie.
Zmiana rodzaju czujek
Jeżeli nie ma możliwości zastosowania czujek punktowych, to modyfikujemy projekt (np. stosujemy czujki liniowe). Jeżeli przestrzeń jest nadzorowana za pomocą liniowych czujek dymu, to należy pamiętać o tym, że gdy dane pomieszczenie jest nadzorowane pojedynczą czujką, zasięg jest inny niż wówczas, gdy zastosowanych jest kilka czujek. To zagadnienie jest omawiane na kursach dla projektantów organizowanych przez IBP NODEX.
Sposób prowadzenia linii dozorowej
Na koniec trzeba poruszyć problem wyboru sposobu wprowadzenia i wyprowadzenia linii dozorowej z przykładowego pomieszczenia.
 Rys. 10. Modyfikacja sposobu rozmieszczania punktowych czujek dymu
Rys. 10. Modyfikacja sposobu rozmieszczania punktowych czujek dymu
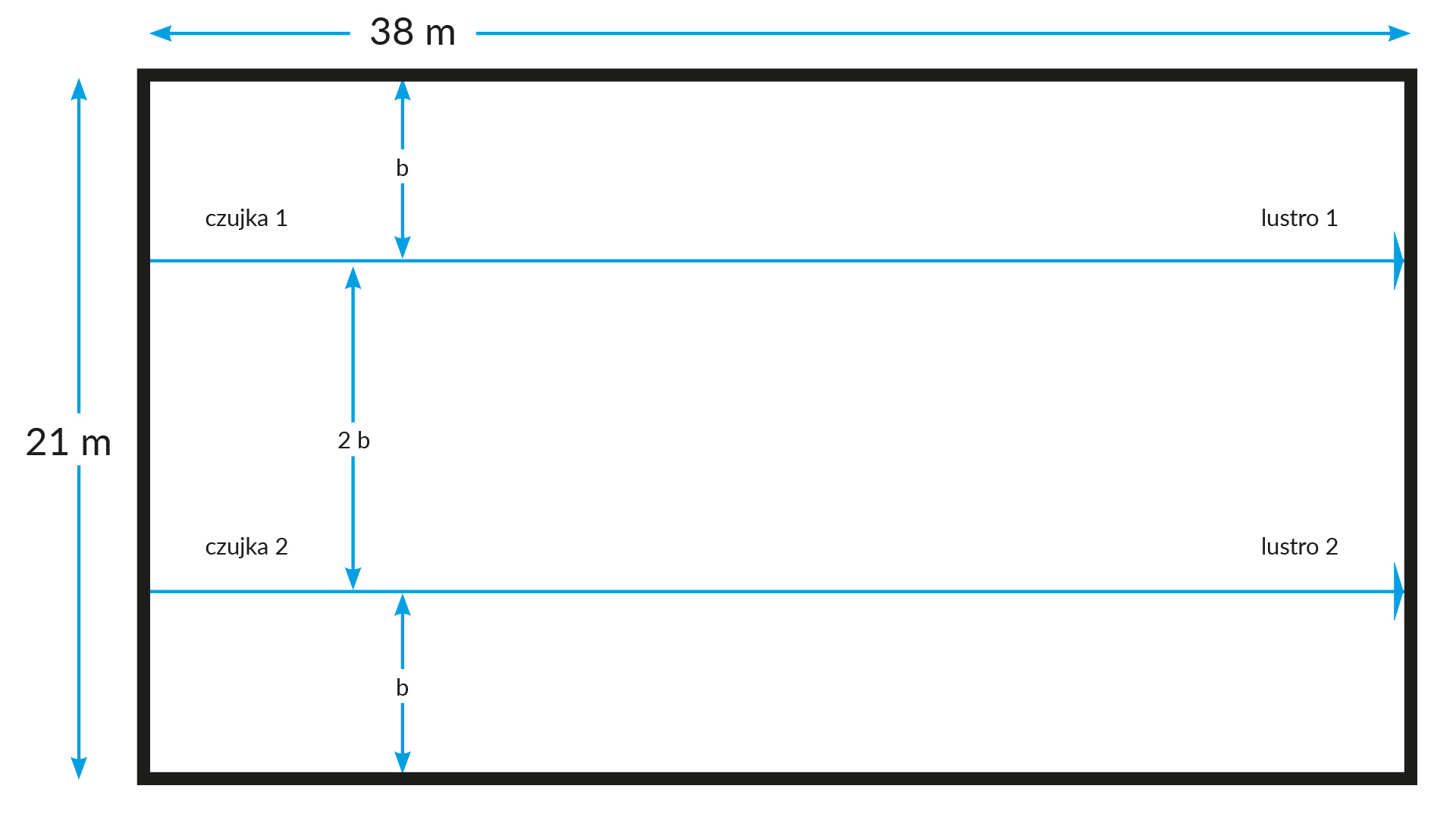 Rys. 11. Nadzorowanie pomieszczenia z pierwszego przykładu za pomocą liniowych czujek dymu
Rys. 11. Nadzorowanie pomieszczenia z pierwszego przykładu za pomocą liniowych czujek dymu
 Rys. 12. Prawidłowy sposób prowadzenia linii dozorowej
Rys. 12. Prawidłowy sposób prowadzenia linii dozorowej

Rys. 13. Nieprawidłowy sposób prowadzenia linii dozorowej
Przyjmijmy, że:
- linia dozorowa jest w formie pętli dwustronnie zasilanej i odpytywanej,
- zastosowany jest uniepalniony przewód YnTKSY,
- czujki (elementy liniowe) są wyposażone w symetryczne izolatory zwarć.
Proszę zwrócić uwagę, że w początkowej fazie pożaru płomieniowego występującego między czujkami 11 i 12 zniszczeniu ulegnie jedynie przewód linii dozorowej. Przyjęte założenia umożliwiają prawidłowe wykrywanie i sterowanie (na rysunku nie zaznaczono urządzeń we/wy).
Na rysunku 13 pokazano przypadek, w którym przewody linii dozorowej zostały wprowadzone do nadzorowanego pomieszczenia w małej odległości od siebie (np. zastosowano te same elementy podtrzymujące). Pożar płomieniowy spowoduje zniszczenie instalacji przewodowej na wejściu i na wyjściu linii dozorowej. Tym samym cała instalacja sygnalizacji pożarowej może przestać funkcjonować. Należy pamiętać, że niektóre urządzenia automatyki pożarowej są uruchamiane ze znacznym opóźnieniem w stosunku do momentu wykrycia pożaru. Rozwój pożaru w czasie tego opóźnienia może spowodować, że nie zadziałają prawidłowo.
Zapewnienie prawidłowej pracy urządzeń automatyki pożarowej nie jest przedmiotem niniejszego artykułu.
Jerzy Ciszewski
IBP NODEX
http.//ibpnodex.pl
Bibliografia
- CEN/TS54-14:2018 Fire detection and fire alarm systems – Part 14: Guidelines for planning, design, installation, commissioning, use and maintenance.
- VdS 2095:2010-05(07) – VdS-Richtlinien für automatische Brandmeldeanlagen. Planung und Einbau.