


Kamery cyfrowe (IP) coraz częściej mają inteligentne funkcje, które dotychczas były rozwijane w postaci algorytmów (programów) i realizowane przez jednostki serwerowe. Prowadziło to do znacznego obciążenia procesorów i pamięci operacyjnych jednostek serwerowych i tym samym znacznie ograniczało możliwość tworzenia złożonych systemów nadzoru wizyjnego. Do realizacji pojedynczej funkcji wymagana była oddzielna jednostka komputerowa, co znacznie zwiększało koszty tworzenia systemów dozoru wizyjnego z funkcjami inteligentnymi. Pojawienie się procesorów sygnałowych pozwoliło przenieść ciężar obsługi algorytmów z jednostki centralnej na krańce systemu (do kamery). Na rynku możemy spotkać wiele tego typu rozwiązań w postaci kamer z funkcjami inteligentnymi. Ich użyteczność w zaawansowanych systemach dozoru wizyjnego jest jednak bardzo ograniczona. Innowacyjność i istotna zaleta rozwiązania, które jest przedstawione w niniejszym artykule, polega na powiązaniu urządzeń (kamer inteligentnych) z aplikacją do zarządzania systemem wizyjnym NMS. W pierwszej części artykułu zostaną scharakteryzowane kamery z funkcjami inteligentnymi, z naciskiem na same funkcje, natomiast w drugiej opisane będą interakcje z aplikacją NMS.
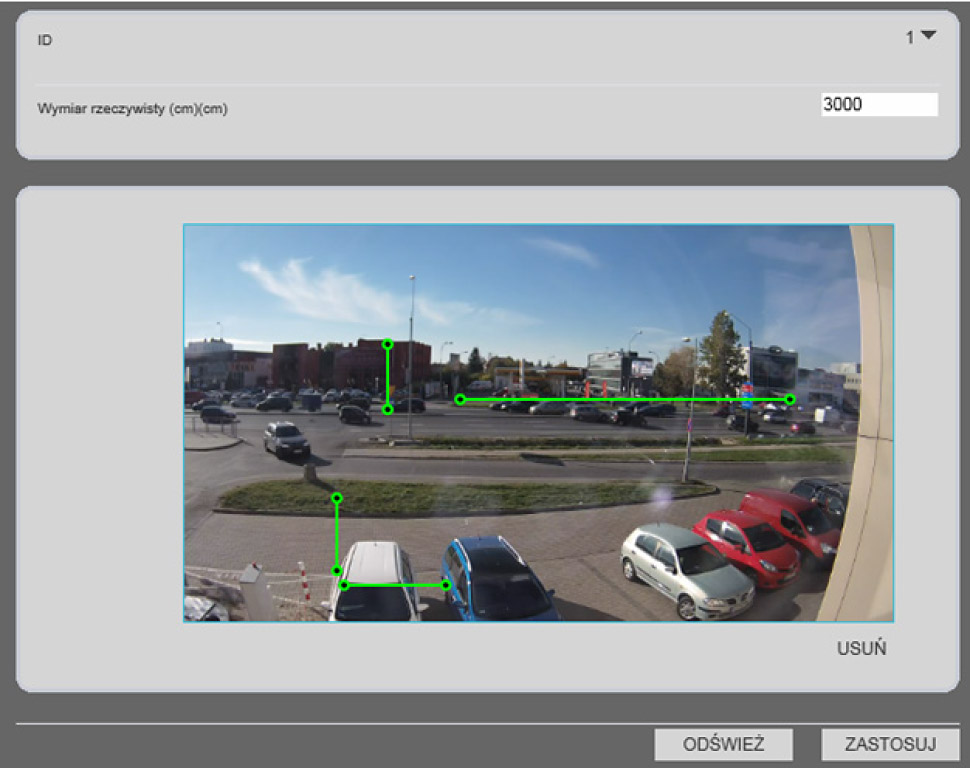
Fot. 1. Kalibracja kamery
Do oferowanych kamer marki NOVUS z inteligentnymi funkcjami należy między innymi wandaloodporna kamera kopułowa NVIP-4DN5042V/IRH-2P oraz kamera w obudowie NVIP-4DN5002H/IRH-1P. Mają one przetworniki CMOS o rozdzielczości 4 Mpx i czułości 0,27 lx przy F:1.4. Aby przystosować je do pracy w całkowitej ciemności, modele te wyposażono w promienniki podczerwieni o zasięgu do 20 metrów. Przy zachowaniu najwyższych rozdzielczości równych 2688×1520 oraz 2560×1440 (QHD) kamery mogą generować do 20 klatek na sekundę. Mimo implementacji funkcji inteligentnych kamery cechuje duża wydajność. Mogą one realizować do trzech równoczesnych połączeń wizyjnych o sumarycznej przepływności 15 Mb/s. Aby ułatwić ustawienie obserwowanej sceny, które ma zasadniczy wpływ na realizację funkcji inteligentnych, kamery zostały wyposażone w obiektywy ze zmienną ogniskową regulowaną w zakresie od 3 mm do 12 mm, który odpowiada granicznym kątom widzenia równym 90° i 32°. Dostępne są dodatkowe akcesoria montażowe w postaci uchwytów ściennych i adapterów do montażu sufitowego kamer kopułowych oraz adapterów do ściennego lub sufitowego montażu kamer typu bullet. Adaptery umożliwiają estetyczne podłączenie kabli. Szczegółowy opis kamer jest dostępny na stronie www.novuscctv.pl.
Kamery mają następujące funkcje inteligentnej analizy obrazu:
- wykrywanie wkroczenia do określonej strefy,
- wykrywanie przekroczenia określonej linii,
- wykrywanie przekroczenia dwóch określonych linii,
- wykrywanie wałęsania się,
- wykrywanie tłumu,
- wykrywanie pozostawionego obiektu,
- wykrywanie zniknięcia obiektu,
- wykrywanie poruszania się z niedozwoloną prędkością,
- wykrywanie poruszania się w niedozwolonym kierunku,
- wykrywanie parkowania, wykrywanie sabotażu kamery.
Warto nadmienić, że powyższe funkcje mogą być realizowane równolegle. Nie ma ograniczenia liczby aktywnych funkcji, choć trudno wyobrazić sobie scenę, w przypadku której sensowne byłoby uruchomienie wszystkich równocześnie. Konfigurację kamery należy rozpocząć od ustawienia wielkości sceny za pomocą dwóch poziomych i dwóch pionowych linii o odpowiednich długościach w bliższej i dalszej perspektywie. Dodatkowo, w celu poprawy skuteczności, należy zdefiniować typ sceny (wewnętrzna, zewnętrzna) oraz rozważyć redukcję szumu w obrazie, drżenia obrazu, niskiego kontrastu oraz cyklicznego ruchu w obserwowanej scenie (np. ruchu łopat elektrowni wiatrowej). Te wstępne ustawienia (kalibracje) powinny być poprzedzone prawidłową instalacją kamer. Co istotne, kamery powinny być instalowane nie wyżej niż na wysokości dwóch metrów w przestrzeni zamkniętej i ośmiu metrów w przestrzeni otwartej i nie powinny być skierowane do góry lub do dołu. Kamery realizujące funkcję zliczania osób powinny być umieszczone w odległości około dwóch metrów od obserwowanego przejścia, na wysokości górnej krawędzi futryny, tak by wykrywane obiekty były dobrze widoczne. Kamera jest zdolna do wykrywania obiektów mieszczących się w wycinku obrazu o rozmiarach co najmniej 8×8 pikseli.
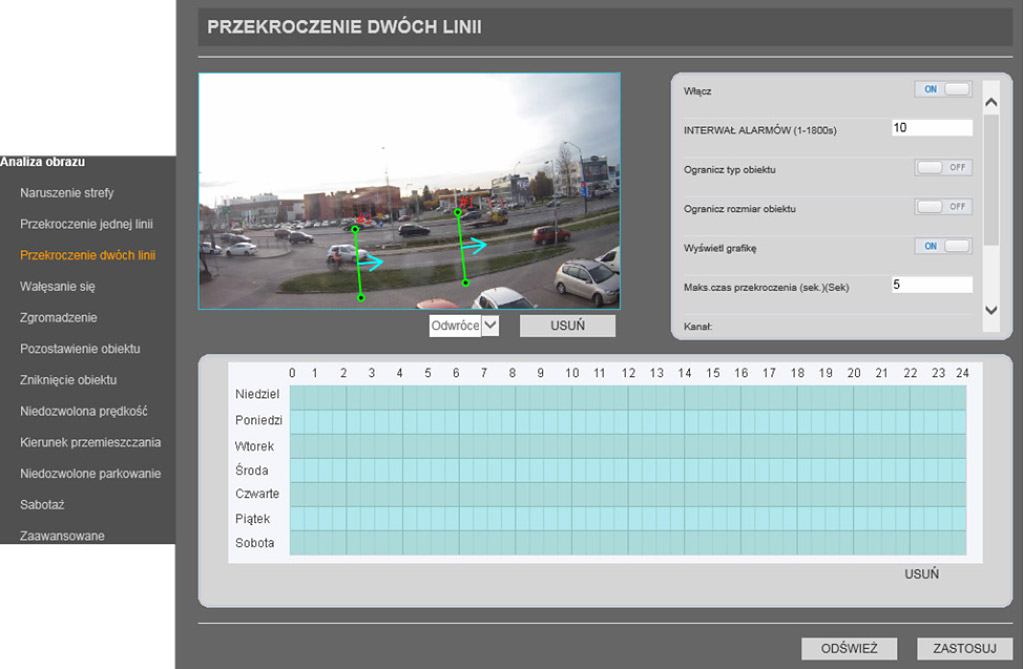
Fot. 2. Przekroczenie dwóch linii
Naruszenie strefy
Alarm jest generowany w momencie wykrycia ruchu w zdefiniowanej strefie, która może mieć kształt wielokąta. Dodatkowo możemy wprowadzić ograniczenie typów rozpoznawanych obiektów. Na przykład kamera może odróżniać ludzi od samochodów, reagować tylko na samochody i ignorować pieszych.
Przekroczenie jednej lub dwóch linii
Funkcja umożliwia generowanie alarmów w przypadku przekroczenia jednej lub dwóch linii w określonym kierunku i w określonej kolejności. W przypadku tej funkcji również możemy wprowadzić ograniczenie typów rozpoznawanych obiektów i ich minimalnej oraz maksymalnej wielkości.
Wałęsanie się, detekcja tłumu
Jeśli pojedynczy obiekt lub wiele obiektów porusza się przez określony czas w wyznaczonej strefie, zostanie uruchomiony alarm. Funkcja ta jest wykorzystywana m.in. w celu wykrycia osób nieuprawnionych do przebywania w danym miejscu, np. w przedsionkach bankomatowych.
Wykrywanie obiektów nieruchomych
Jeżeli jakiś obiekt pojawi się w zdefiniowanej strefie i będzie znajdował się w niej przez dłuższy czas lub jakiś nieruchomy obiekt zostanie nagle usunięty, zostanie uruchomiony alarm. Można utworzyć wiele stref wykrywania. Funkcja ta jest szczególnie przydatna w obiektach użyteczności publicznej, takich jak dworce kolejowe i autobusowe, porty lotnicze itp. Analogiczny algorytm jest wykorzystywany w przypadku funkcji Niedozwolone parkowanie.
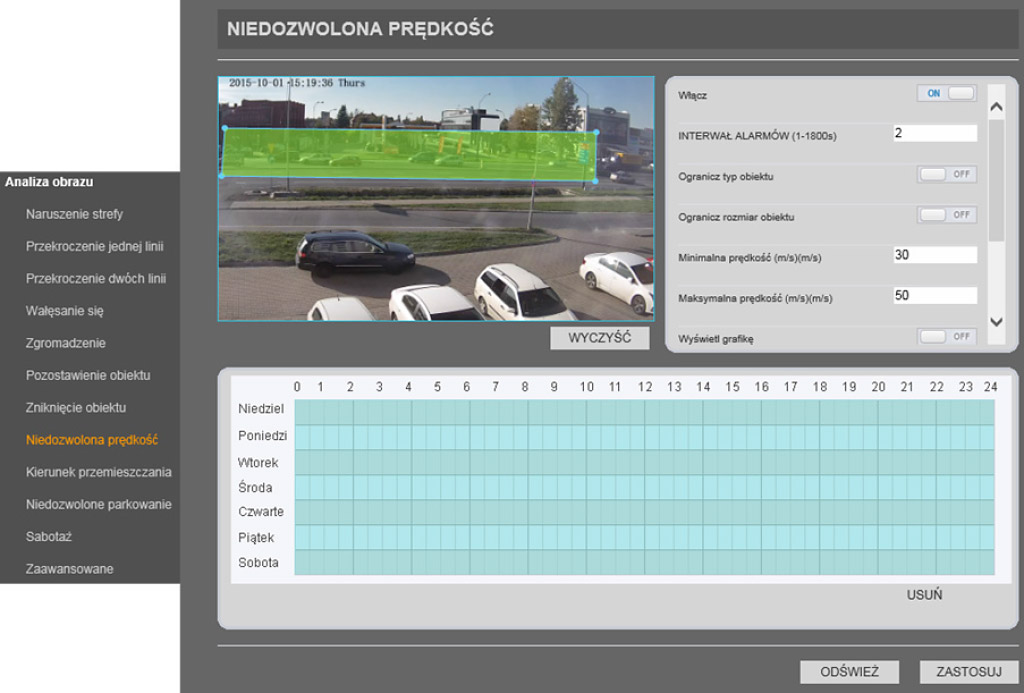
Fot. 3. Zdefiniowana strefa dla funkcji „Niedozwolona prędkość”
Niedozwolona prędkość
Jeśli wykryty obiekt przekroczy prędkość poruszania się w wyznaczonej strefie, zostanie uruchomiony alarm. Do poprawnego działania funkcji konieczna jest poprawna kalibracja kamery, czyli ustawienie odpowiedniej wielkości sceny.
Kierunek przemieszczania
Funkcja ta umożliwia wyznaczenie kierunku przemieszczania się w strefie. Kiedy na ulicy jednokierunkowej samochód będzie poruszał się w niewłaściwym kierunku, zostanie wygenerowany alarm.
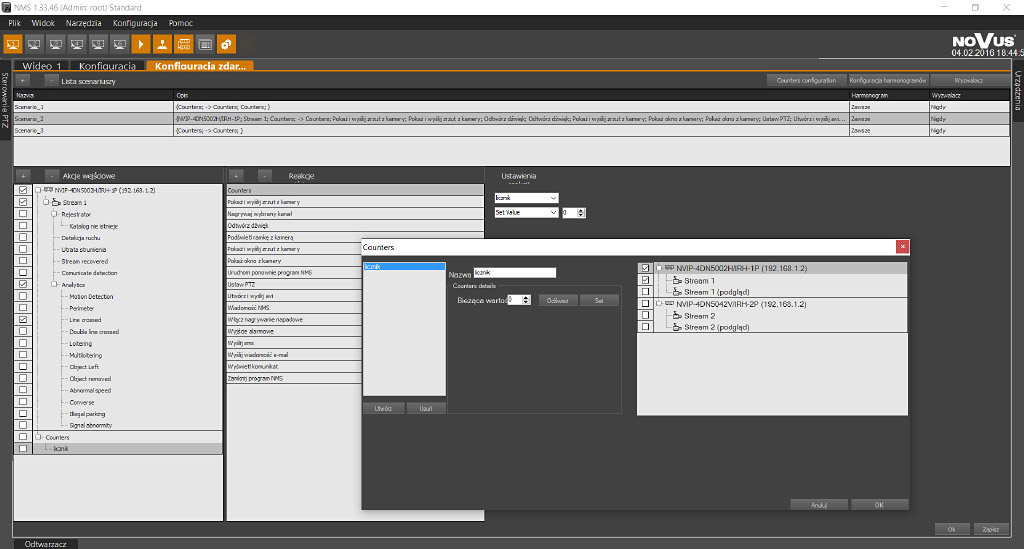
Fot. 4. Wybieranie reakcji systemu na obecność określonej liczby obiektów w danym miejscu
Sabotaż
Funkcja wykrywania sabotażu generuje alarm w przypadku próby zasłonięcia obiektywu lub zmiany ustawienia kamery. Alarm zostanie wygenerowany, gdy 75% obrazu zostanie zasłonięte lub kamera wykryje brak oświetlenia sceny, a średni poziom szarości spadnie poniżej 40%. Informacje o wszystkich wykrytych zdarzeniach mogą być wysyłane równolegle z obrazem do aplikacji NMS, gdzie podlegają dalszej obróbce. W części obrazu mogą być wyświetlane liczniki, które będą zmieniać swój stan w zależności od liczby obiektów wkraczających do danej strefy lub opuszczających ją. W aplikacji NMS można wybrać reakcję lub wiele reakcji systemu na określony stan licznika (fot. 4.).
W aplikacji NMS wykrywane są także inne zdarzenia, na które można odpowiednio reagować. Dzięki temu operator systemu może skoncentrować się na najważniejszych zdarzeniach, co przekłada się na efektywniejszą pracę. Jest to szczególnie ważne ze względu na dynamiczny wzrost liczby kamer w systemach dozorowych.
Funkcje inteligentne i integracja będą wyznaczać główne kierunki rozwoju systemów dozoru wizyjnego. Rozwój ten będzie postępował wraz ze zwiększaniem mocy obliczeniowej procesorów DSP i obniżaniem ich cen. W miarę rozwijania funkcji inteligentnych udoskonalane będą także narzędzia w aplikacji NMS służące do syntezy, wizualizacji i agregacji danych. Zebrane dane mogą być wykorzystywane nie tylko do celów ściśle związanych z ochroną. Można je wykorzystać w marketingu i innych procesach biznesowych.
Patryk Gańko
AAT HOLDING